160
Tecnología y Ciencias del Agua
, vol. VIII, núm. 4, julio-agosto de 2017, pp. 157-166
Ojeda-Bustamante
et al
.,
Aplicaciones de los vehículos aéreos no tripulados en la ingeniería hidroagrícola
•
ISSN 2007-2422
Uso de VANTs en la agricultura
Con base en los trabajos de Chao y Chen
(2012), un sistema que integra a un VANT
para aplicaciones de uso agrícola debe tener
las siguientes características: a) bajo costo,
que depende del tipo de VANT y del nivel de
equipamiento; b) amplia cobertura espacial,
para el monitoreo de decenas a miles de hec-
táreas, que depende de la velocidad, altura
y duración del vuelo, así como de las carac-
terísticas de la cámara, como el ángulo de
visión, distancia focal, y tamaño del sensor; c)
monitoreo frecuente de variables de procesos
o actividades que presentan alta variabilidad
espacial y temporal, como la aplicación del
riego, desarrollo fenológico, y estado fitosani-
tario y nutricional de los cultivos; d) alta reso-
lución espacial, para la toma y clasificación de
imágenes que permitan detectar con precisión
el grado de afectación o estrés de una parcela
a una variable ambiental, hídrica, edáfica o
vegetal; e) facilidad de manipulación, para
los procedimientos de adquisición, manejo y
análisis de datos; f) algoritmos avanzados de
monitoreo/actuación, que permitan progra-
mar y ejecutar misiones de vuelo de manera
eficiente, rápida y confiable.
Las aplicaciones de los VANTs están es-
trechamente relacionadas con la percepción
remota, en particular con la teledetección.
Tradicionalmente, las plataformas para realizar
esta tarea consistían de sensores montados
en satélites, aviones y vehículos terrestres. La
teledetección de variables agrícolas se basa en
el principio de que la radiación reflejada por
las plantas es inversamente proporcional a la
radiación absorbida por pigmentos de la planta,
y varía con la longitud de onda de la radiación
incidente. La mayoría de los pigmentos, como
la clorofila, absorben la radiación en el espectro
visible de 400 a 700 nm (Pinter
et al
., 2003). En
el caso de los suelos desnudos, la radiación se
ve afectada principalmente por la humedad
del suelo y el contenido de materia orgánica
(Viscarra-Rossel, Walvoort, McBratney, Janik,
& Skjemstad, 2006). El suelo desnudo y el dosel
de los cultivos a menudo están presentes en
una imagen espectral, y la mezcla de dos firmas
espectrales puede confundir la interpretación de
los datos de reflectancia (figura 2). De mane-
ra usual se recurre a la mezcla de dos o más
regiones espectrales a través de índices espec-
trales, como el índice diferencial de vegetación
normalizado NDVI (Deering, 1978), que resalta
una característica de interés (vegetación) de la
superficie terrestre y oculta otras.
Algunas de las aplicaciones de teledetección
en la agricultura son, por ejemplo, la predicción
del rendimiento de los cultivos (Shanahan
et al
.,
2001), y la determinación del grado del estrés
nutricional e hídrico de los cultivos (Clayl, Kim,
Chang, Clay, & Dalsted, 2006). No obstante su
utilidad, los VANTs tienen algunas limitaciones,
como plataformas de teledetección, debido prin-
cipalmente al tiempo de vuelo y la capacidad de
carga útil, por lo que es necesario balancear las
limitaciones tecnológicas inherentes al tamaño
de la plataforma y a la miniaturización de los
sensores. Por lo regular se economiza en los
materiales, afectando la calidad de los datos,
la precisión de los sensores, la capacidad de
almacenamiento y la calidad del
hardware
de
procesamiento a bordo del VANT (Kelcey &
Lucieer, 2012). Una relación muy completa de
categorías y capacidades de estos vehículos pue-
de encontrarse en Watts, Ambrosia y Hinkley
(2012).
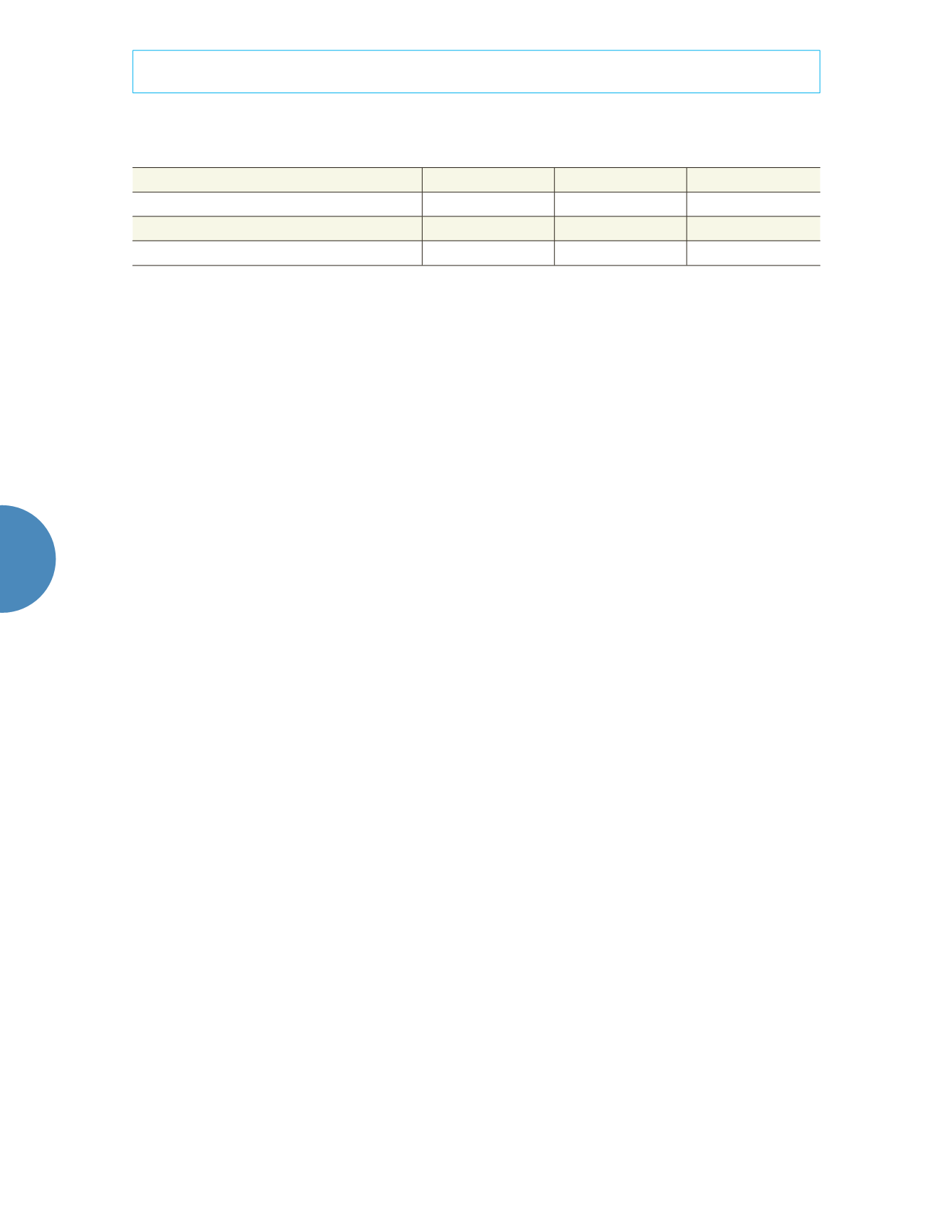
Cuadro 1. Características de los VANTs equipados con sensores remotos (Van Blyenburgh, 2013).
Nombre
Peso (kg)
Autonomía (h)
Carga por peso (kg)
Ala fija
0.5-4
0.5-2
1
Multirrotores (alas rotatorias)
1.2-3
0.33-1.46
0.75-2.5
Helicóptero (un ala rotatoria)
90-100
1-2
28-30


