9
Tecnología y Ciencias del Agua
, vol. VIII, núm. 4, julio-agosto de 2017, pp. 5-18
Buendía-Espinoza
et al
.,
Identificación de cambios en la ciclogénesis del Atlántico Norte mediante un modelo de mezclas Gaussianas
ISSN 2007-2422
•
j
=
1;
j
=
1
K
j
0
(1)
La función de densidad probabilidad (fdp)
de la variable aleatoria
X
(de dimensión
d
) en la
forma de mezclas finitas es:
p x
,
( )
=
j
p x
;
j
(
)
j
=
1
K
=
j
1
2
( )
d
/2
j
1/2
e
1
2
x
μ
j
(
)
T
j
1
x
μ
j
(
)
j
=
1
K
(2)
donde
f
denota el vector de parámetros de la
mezcla;
p
(
x
;
θ
j
) es la función de densidad de
probabilidades correspondientes al
K
-ésimo
componente;
π
j
es el peso de la mezcla; y
θ
j
denota el vector de todos los parámetros desco-
nocidos de los elementos de los vectores de las
medias
µ
j
, y elementos distintos de matrices de
covarianzas
∑
j
para
j
= 1,…,
K
, que pertenecen
a algún espacio de parámetros
Q
.
a) Estimación de los parámetros utilizando el
algoritmo EM
Existen varios procedimientos para determi-
nar los parámetros de un modelo de mezclas
Gaussianas (MMG) de un conjunto de datos
(McLachlan & Basford, 1988). Sin embargo, el
método más popular es el de máxima verosi-
militud (ML, por sus siglas en inglés). En este
trabajo, la estimación de los parámetros se hizo
utilizando técnicas de máxima verosimilitud
vía el algoritmo EM (Dempster, Laird, & Ru-
bin, 1977; Redner & Walker, 1984; Maitra &
Melnykov, 2010).
El algoritmo EM para mezclas Gaussianas es
un proceso iterativo que consiste de dos etapas:
a) esperanza (E) y b) maximización (M). En el
caso de componentes Gaussianos, la densidad
de la mezcla contiene los siguientes parámetros:
π
j
,
µ
j
y
∑
j
, donde
j
= 1,…,
K
. La log-verosimilitud
condicionada completa esperada para el conjun-
to de datos, conocida como función
Q
, es igual a:
Q
,
x
1
, ,
x
n
(
)
=
1
2
ij
ln
j
+
x
i
μ
j
(
)
T
j
1
x
i
μ
j
(
)
{
}
j
=
1
K
i
=
1
n
+
ij
ln
j
( )
j
=
1
K
i
=
1
n
dn
2 ln 2
( )
(3)
El paso-E consiste en la actualización de las
probabilidades de pertenencia
p
ij
(
t
+1)
, dada la
estimación de los parámetros actuales
f
t
:
ij
t
+
1
( )
=
ij
t
( )
p x
i
;
μ
j
t
( )
,
j
t
( )
(
)
ij
t
( )
p x
i
;
μ
j
t
( )
,
j
t
( )
(
)
j
=
1
K
(4)
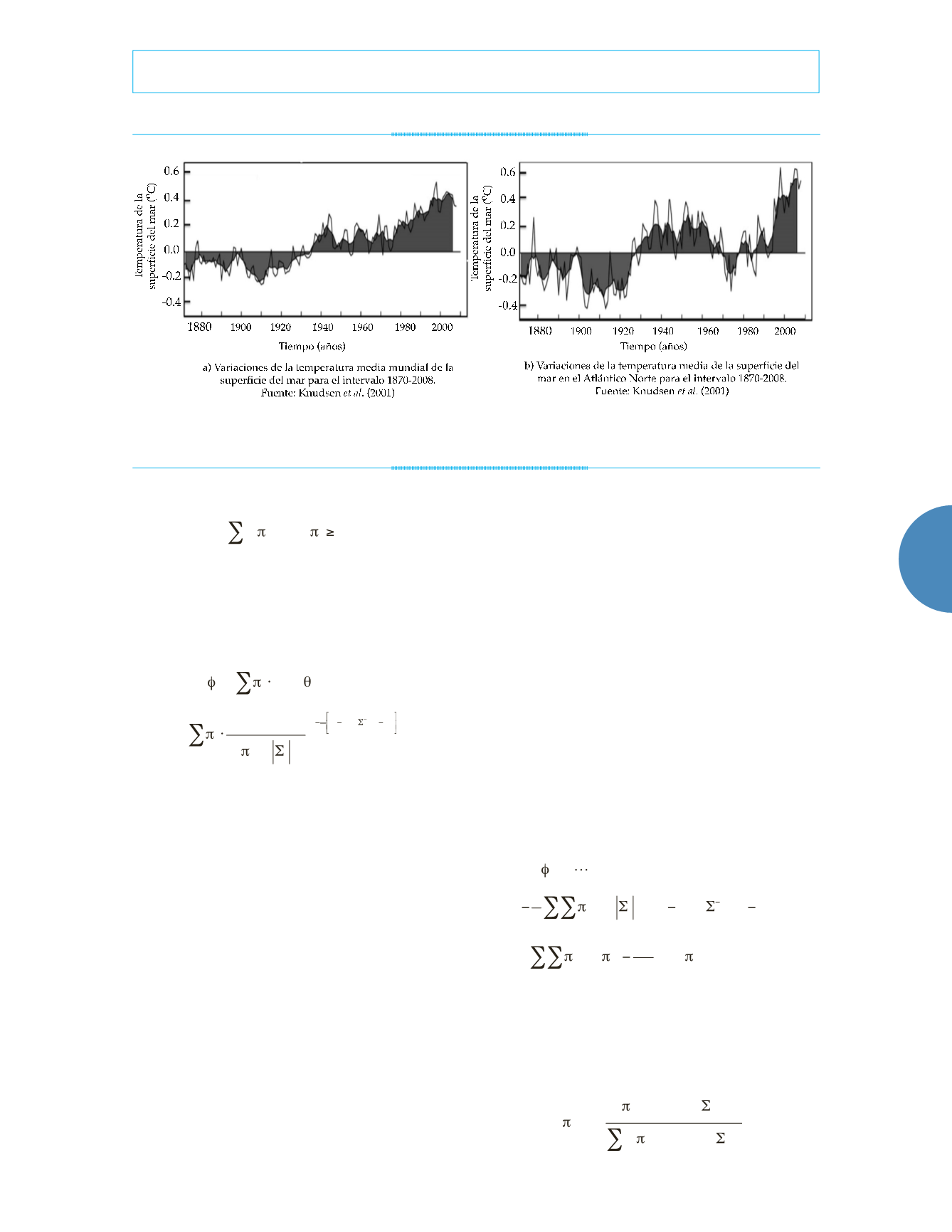
Figura 2. Variaciones de la temperatura media de la superficie del mar global y del Atlántico Norte.


